Building Dynamics Lab
Buildings are assumed to be stable and inactive even thought their external and internal environments are constantly altered by change, exchange and flow of energy, matter, people and information. The way we conceptualize and build buildings today does not successfully engage these dynamics.
Building Dynamics Lab is engaged in design and prototyping of dynamic architectural elements and assemblies. At the core of our work are two sets of questions. The first set is about the nature of the architectural assembly. How can an architectural assembly be designed as a dynamic and adaptive material system? Can this be achieved through material itself instead of mechanical components? The second set of questions frames the broader discussion of dynamic and adaptive building components. What kind of transformative effect these dynamic elements could have on their users and on environment? And in return how would that change the way we design buildings? What are the opportunities and challenges presented by building dynamics? How could the built environment become a more productive participant within larger ecologies? View the media gallery here.
Soft Architectural Assemblies
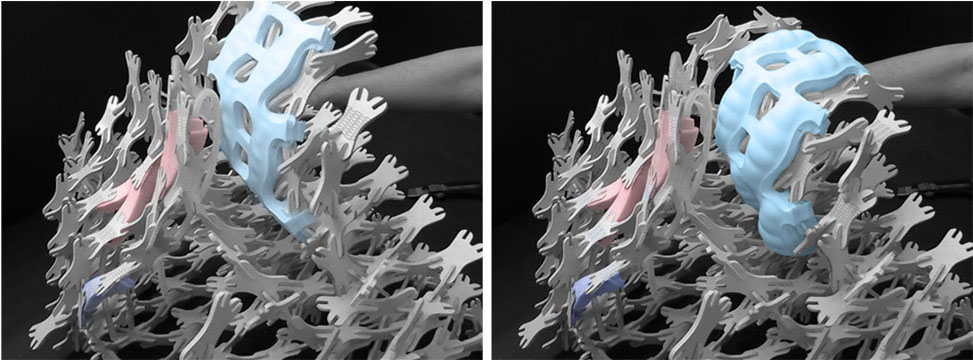
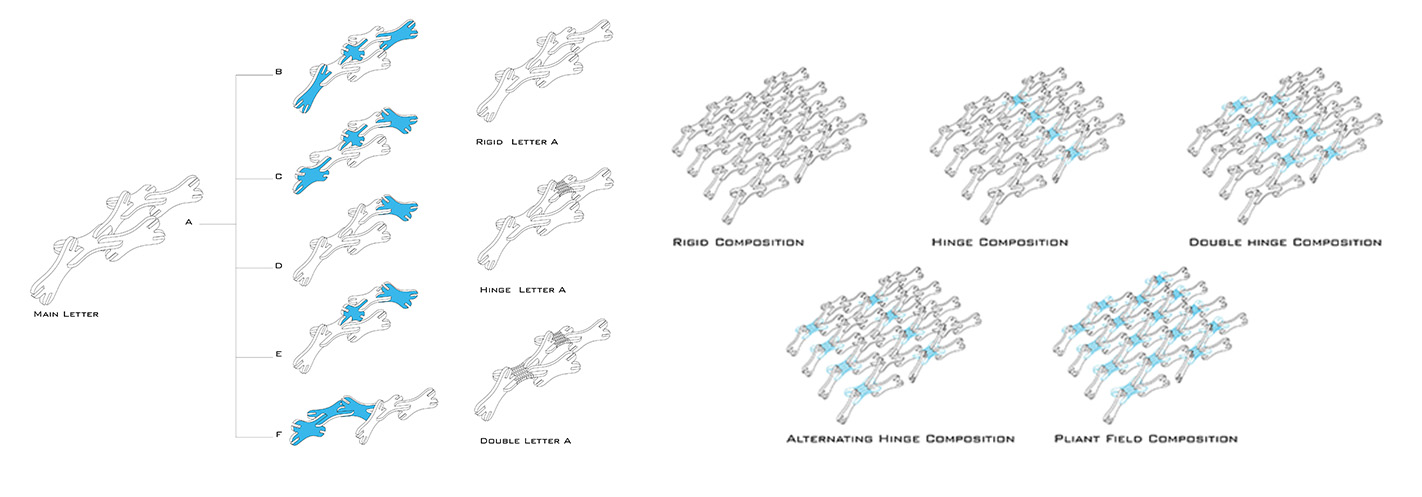
Soft Architectural Assemblies project explores integration of custom-made soft robotic muscles into a component-based surface. It is part of a broader research agenda focused on new material behaviors and their capacity to produce adaptive and dynamic material systems. The project examines the use of a pneumatic system as a form of material-based and pneumatic actuation and presents ongoing research into the capacity of integrated pneu structures to generate kinetic movement within a component-based assembly to produce a responsive and ‘programmable’ architectural skin. This is a prototype-based exploration that demonstrates different kinds of movement achieved by different silicone muscle types and proposes a light modular construct, its components, and patterns of aggregation that work in unison with the silicone muscles to produce a dynamic architectural skin. The project is informed by a history of pneumatic structures, the technology of soft robotics, and a kit-of-parts design strategy.
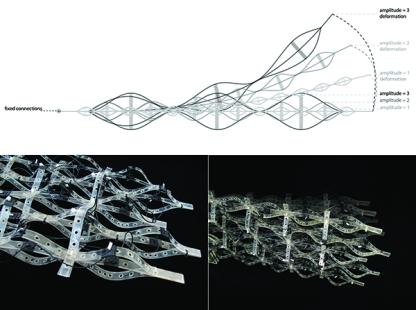
Pneu is a primary form of living nature, an effective structural system as well as an instrument of form giving. Every cell is a pneu structure. An elastic membrane that delineates pneu structures responds dynamically to the change of pressure by changing its mass. The change in pressure/mass can cause considerable physical transformation of the structure. This transformation is what enables a pneu structure to produce a kinetic effect in its own structure and also in structures attached to it. In engineering, rigid materials are employed to fabricate precise and predictable dynamic systems, but natural systems often exceed this performance with soft and flexible bodies.
In soft robotics, the pneu-like capacity is used to design robots that move by manipulating the inflation and deflation patterns or handle fragile objects. Their bodies are capable of large-scale deformation and high level of compliance. Some of these robots are able to move around obstacles or squeeze under them. Research by Harvard’s Biodesign Lab and soft robot fabrication techniques described by Andrew D. Marchese et al. provided a starting point for the initial studies of pneu elements used in this project. Other relevant studies are related to the nature of the soft actuator’s movement and their motion patterns, and the complexity of this movement. The capacity of soft robotic components to affect larger structures in which they are incorporated is of key importance for this project.
The project presented here attempts to address two challenges in designing dynamic and adaptive surfaces: actuation system and surface tectonics. In doing so it explores a capacity of pneu structures to induce kinetic movement in structures, and articulates a component based structure that facilitates movement. The project’s main premise is that integration of elastic inflatable pneumatic components into a component-based structure will influence the structure dynamically and support a variety of movements. The project is informed by a history of pneumatic structures, the technology of soft robotics, and a kit-of-parts design strategy.